线性代数第十讲:矩阵的四个基本子空间
一、课程回顾与修正
- 回顾:上一讲中,我们讨论了矩阵的列空间和零空间。
- 修正:在上一讲中,我犯了一个错误。我选择了向量
[1, 1, 2]和[2, 2, 5]作为基,并试图加入[3, 3, 8]作为第三个向量。但一位学生指出,这个矩阵的行是线性相关的(有两行相同),因此列向量不可能线性独立。这导致矩阵不可逆,秩为 2,而不是 3。
二、矩阵的四个基本子空间
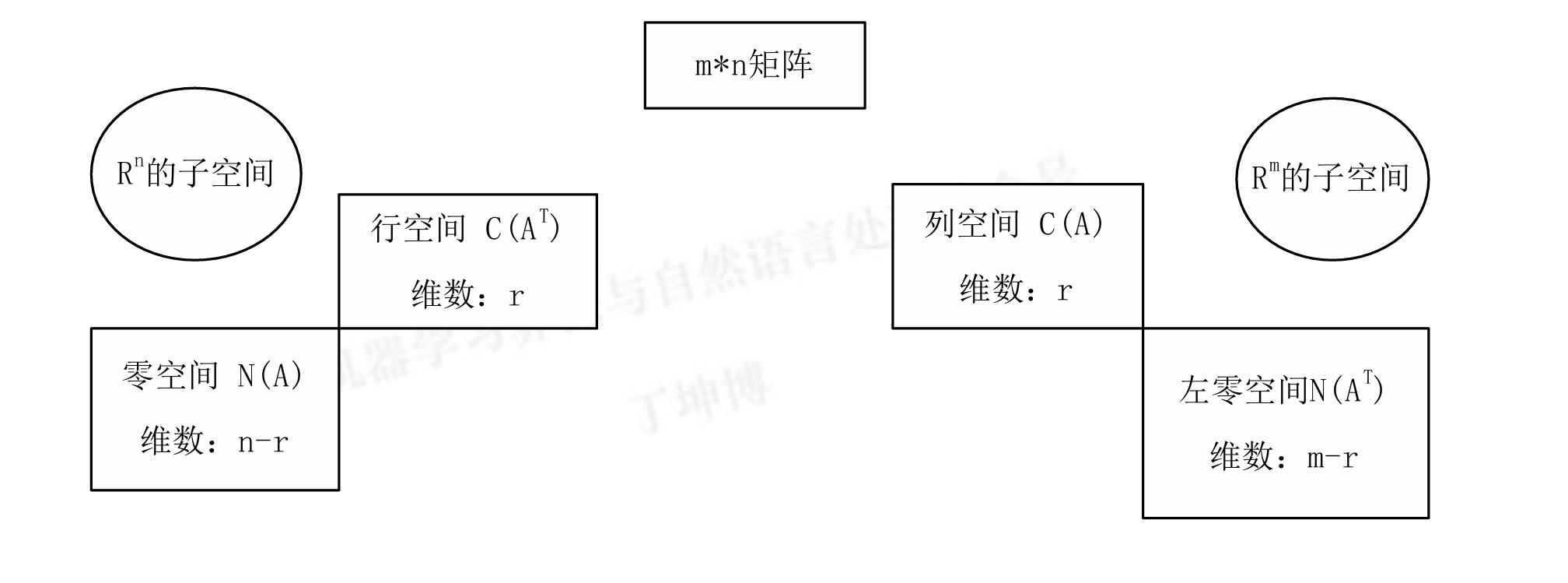
矩阵 的四个基本子空间是线性代数的核心内容,它们分别是:
- 列空间 :由矩阵 的列向量的所有线性组合构成。
- 零空间 :满足 的所有向量 构成。
- 行空间:由矩阵 的行向量的所有线性组合构成。可以通过转置矩阵 的列空间来表示。
- 左零空间 :满足 的所有向量 构成,也称为 的左零空间。
如何获得空间的全部信息
1.空间的一组基
2.空间的维数
子空间的维度
- 列空间 的维度:矩阵 的秩 。
- 行空间 的维度:同样为秩 。行空间和列空间的维度相同。
- 零空间 的维度:,其中 是矩阵 的列数。
- 因为秩与主元的个数相同。n-r是自由变量的个数
- 左零空间 的维度:,其中 是矩阵 的行数。
子空间的关系
- 列空间和零空间位于 中,它们的维度之和为 。
- 行空间和左零空间位于 中,它们的维度之和为 。
三、子空间的基
- 行变换不会改变行空间,但会改变列空间
1. 列空间的基
- 通过行简化(高斯消元法),找到主元列(pivot columns)。
- 主元列构成列空间的基,其数量即为矩阵的秩 。
2. 零空间的基
- 通过行简化将矩阵 化为简化行阶梯形式 。
- 从 中读取特殊解(special solutions),这些解构成零空间的基。
- 零空间的维度为 ,即自由变量的数量。
3. 行空间的基
- 行空间的基可以通过转置矩阵 的主元列得到。
- 对于矩阵 ,其行空间的基是简化行阶梯形式 的前 行。
4. 左零空间的基
-
通过高斯-若尔当消元法,将矩阵 化为简化行阶梯形式 。
- 这种消元法一般用来求解逆矩阵
-
矩阵 记录了将 化为 的所有行操作。
-
左零空间的基可以通过 的最后一行得到,其维度为 。
- 写出EA = R,寻找R中的零行,对应找到E中的线性组合方式,就得到了左零空间的基。

四、示例
考虑矩阵 :
- 行简化:继续化简:
1
2
3
4[1 1 1]
[2 1 2] -> [0 -1 0] (R2 = R2 - 2R1)
[3 2 3] -> [0 -1 0] (R3 = R3 - 3R1)
[1 1 1] -> [0 0 0] (R4 = R4 - R1)最终得到简化行阶梯形式 :1
2
3
4[1 1 1]
[0 1 0] (R2 = -R2)
[0 -1 0] -> [0 0 0] (R3 = R3 + R2)
[0 0 0]1
2
3
4[1 0 1]
[0 1 0]
[0 0 0]
[0 0 0] - 行空间的基: 的前两行
[1, 0, 1]和[0, 1, 0]。 - 左零空间的基:通过高斯-若尔当消元法,得到 :左零空间的基为 的最后一行
1
2
3
4[1 0 0]
[2 1 0]
[3 0 1]
[1 0 0][1, 0, -1]。因为这一行对应的结果为0
五、新的向量空间
- 矩阵空间 :将所有 矩阵视为向量空间。
- 子空间:
- 上三角矩阵
- 对称矩阵
- 对角矩阵(上三角矩阵与对称矩阵的交集)
- 维度计算:
- 对角矩阵的维度为 3,基为:
以上是本讲的详细笔记,涵盖了矩阵的四个基本子空间及其基和维度的计算方法。