线性代数第十一讲:矩阵空间、子空间与秩
一、矩阵空间与子空间
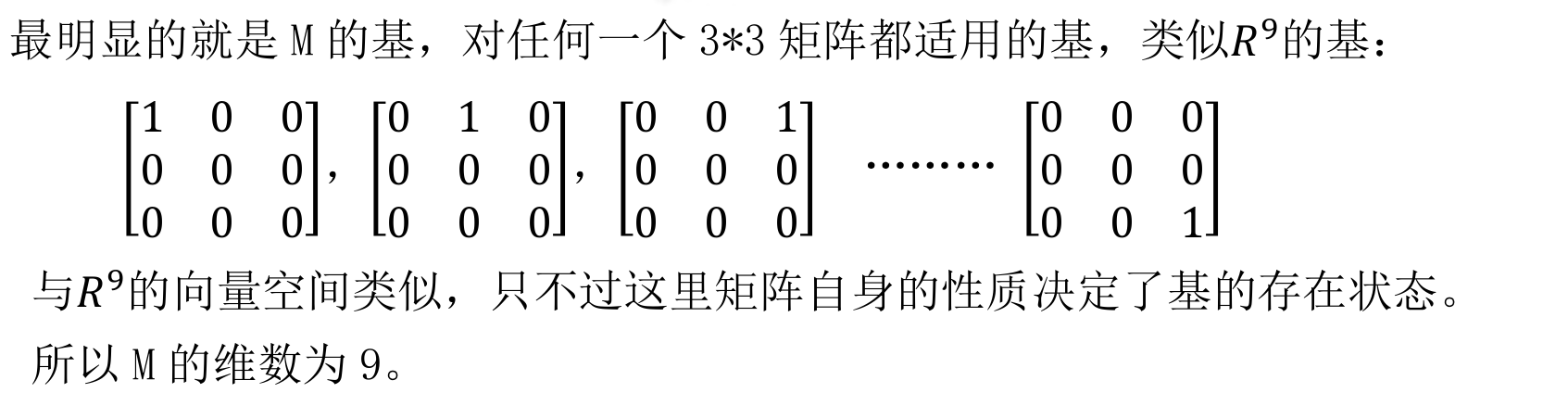
1. 矩阵空间 M
- 定义:所有 3×3 矩阵构成的空间。
- 性质:可以进行矩阵加法和数乘,但不涉及矩阵乘法。
- 维度:9,因为需要 9 个参数来确定一个 3×3 矩阵。
- 标准基:由 9 个矩阵组成,每个矩阵在某个位置有一个 1,其余位置为 0。
2. 子空间
(1)对称矩阵空间 S
-
定义:所有 3×3 对称矩阵构成的子空间。
-
性质:对称矩阵相加仍为对称矩阵。
-
维度:6,因为对称矩阵由对角线上的 3 个元素和对角线上方的 3 个元素决定。
-
基:由 6 个对称矩阵组成,每个矩阵在对称位置有一个 1,其余位置为 0。
(2)上三角矩阵空间 U
-
定义:所有 3×3 上三角矩阵构成的子空间。
-
性质:上三角矩阵相加仍为上三角矩阵。
-
维度:6,因为上三角矩阵由主对角线及其上方的 6 个元素决定。
-
基:由 6 个上三角矩阵组成,每个矩阵在上三角位置有一个 1,其余位置为 0。
(3)对角矩阵空间 D
3. 子空间的交集与和
- 交集:S∩U=D,即对角矩阵空间。
- 并集:并集不是向量空间,没有研究意义
- 正如我们在零空间那一节中提到
- 两个零空间的交集为零空间
- 两个零空间的并集不是零空间(大概率)
- 和:S+U=M,即所有 3×3 矩阵。
- 维度公式:
dim(S+U)=dim(S)+dim(U)−dim(S∩U)

例如,dim(S)=6,dim(U)=6,dim(S∩U)=3,因此 dim(S+U)=9。
二、微分方程的解空间
同样的“空间”概念还适用于很多地方,这样的线性空间内元素不一定是向量,矩阵,还可以是方程的解。
1. 方程 y′′+y=0
- 解:y=cos(x) 和 y=sin(x) 是解。
- 解空间:由 cos(x) 和 sin(x) 张成。
- 维度:2,因为解空间由两个线性无关的函数构成。
- 基:{cos(x),sin(x)}。
三、秩与秩一矩阵
1. 秩的性质
- [[矩阵的秩]]:矩阵中线性无关的行或列的最大数目。
- 性质:秩不超过矩阵的行数和列数。
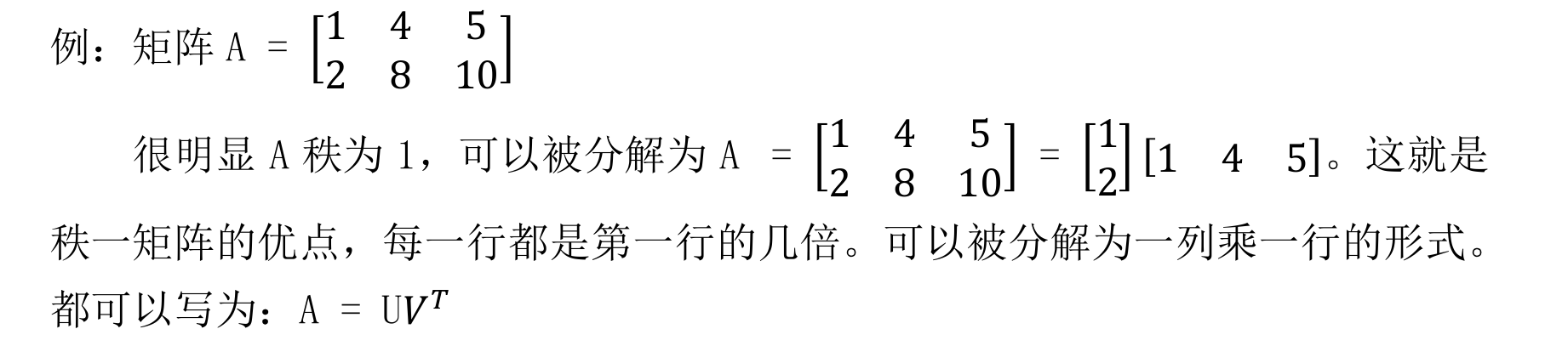
2. 秩一矩阵
- 定义:秩为 1 的矩阵。
- 性质:秩一矩阵可以表示为一个列向量与一个行向量的乘积。
A=uvT
其中 u 是列向量,vT 是行向量。
- 应用:秩一矩阵是构建其他矩阵的基本单元。秩一矩阵的另外一个优点是它可以“搭建”其他矩阵,比如秩为4的矩阵,通过四个秩一矩阵就能搭建出来。具体过程类似于矩阵乘法中的“列乘行”形式,通过一列一行搭出一个矩阵。
3. 秩与子空间
- 秩四矩阵:所有 5×17 的秩四矩阵不能构成子空间,因为两个秩四矩阵的和可能秩更高。
四、具体[[子空间]]示例
1. 四维空间中的子空间 S
- 定义:所有满足 v1+v2+v3+v4=0 的向量 v 构成的子空间。
- 性质:是子空间,因为满足线性组合的性质。
- 维度:3,因为有 4 个变量和 1 个约束条件。
- 基:通过求解齐次线性方程组得到三个线性无关的解向量。
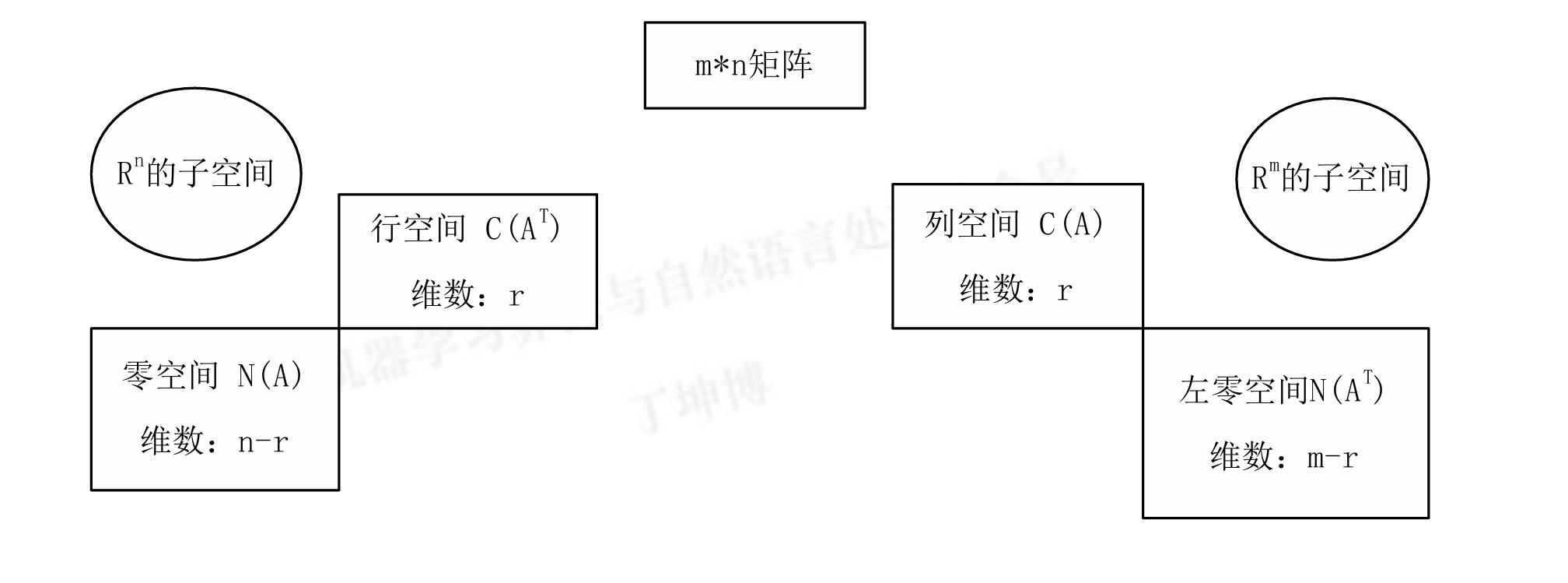
2. 矩阵的四基本子空间
- 矩阵:A=[1111]
- 秩:1
- 四基本子空间:
- 列空间 C(A):维度为 1,基为 {[1]}。
- 零空间 N(A):维度为 3,基为 {⎣⎢⎢⎢⎡−1100⎦⎥⎥⎥⎤,⎣⎢⎢⎢⎡−1010⎦⎥⎥⎥⎤,⎣⎢⎢⎢⎡−1001⎦⎥⎥⎥⎤}。
- 行空间 C(AT):维度为 1,基为 {[1111]}。
- 左零空间 N(AT):维度为 0,基为空集。
五、图与小世界现象
1. 图的定义
- 定义:图由节点(nodes)和连接节点的边(edges)组成。
- 示例:一个包含 5 个节点和 6 条边的图。
2. 小世界现象
- 六度分隔:在社交网络中,任意两人之间通常通过不超过六步的中间人连接。
- 数学意义:研究图中节点间的最短路径,理解复杂网络的结构和性质。
- 应用:
- 社交网络:例如,每个人可以被视为一个节点,朋友关系可以被视为边。
- 互联网:网站可以被视为节点,链接可以被视为边。
- 数学问题:通过添加少量“捷径”,可以显著减少节点间的距离。
矩阵空间练习;秩1;小世界图
问题 11.1:[可选](3.5 #41.《线性代数导论》:Strang)
题目要求:
- 将3×3单位矩阵表示为其他五个置换矩阵的线性组合。
- 证明这五个置换矩阵是线性无关的。
- 说明这五个置换矩阵构成了所有行和与列和均相等的3×3矩阵子空间的一个基。
解释与解答
1. 将3×3单位矩阵表示为其他五个置换矩阵的线性组合
3×3单位矩阵 I 为:
I=⎣⎢⎡100010001⎦⎥⎤
3×3置换矩阵:所有3×3的置换矩阵共有6个,它们是单位矩阵的所有可能的行(或列)置换。这6个置换矩阵分别为:
P1=⎣⎢⎡100010001⎦⎥⎤,P2=⎣⎢⎡010100001⎦⎥⎤,P3=⎣⎢⎡001010100⎦⎥⎤
P4=⎣⎢⎡001100010⎦⎥⎤,P5=⎣⎢⎡010001100⎦⎥⎤,P6=⎣⎢⎡100001010⎦⎥⎤
题目要求将单位矩阵 I 表示为这6个置换矩阵中其他5个的线性组合。假设我们选择 P2,P3,P4,P5,P6,则需要找到系数 c1,c2,c3,c4,c5,使得:
I=c1P2+c2P3+c3P4+c4P5+c5P6
2. 证明这五个置换矩阵是线性无关的
假设某个线性组合为:
c1P2+c2P3+c3P4+c4P5+c5P6=0
我们需要证明 c1=c2=c3=c4=c5=0。为此,可以检查矩阵的特定元素。例如,考虑矩阵的对角线元素和非对角线元素,通过这些元素的线性组合必须为零,可以推导出所有系数都为零。
3. 这五个置换矩阵构成了所有行和与列和均相等的3×3矩阵子空间的一个基
行和与列和均相等的3×3矩阵子空间:这个子空间包含所有3×3矩阵,其中每一行的和与每一列的和都相等。例如,单位矩阵 I 的行和与列和均为1,而全1矩阵的行和与列和均为3。
基的定义:基是一组线性无关的向量(或矩阵),它们的线性组合可以生成整个子空间。题目中提到的五个置换矩阵是线性无关的,并且它们的线性组合可以生成所有行和与列和均相等的3×3矩阵子空间。
具体解答
表示单位矩阵为线性组合:
通过观察和计算,可以找到合适的系数。例如:
I=P2+P3+P4−P5−P6
证明线性无关性:
假设:
c1P2+c2P3+c3P4+c4P5+c5P6=0
通过检查矩阵的对角线和非对角线元素,可以推导出 c1=c2=c3=c4=c5=0。
基的验证:
这五个置换矩阵是线性无关的,并且它们的线性组合可以生成所有行和与列和均相等的3×3矩阵子空间。因此,它们构成了该子空间的一个基。
问题 11.2:(3.6 #31.)
题目要求:
- 找出所有满足 AX=0 的3×3矩阵 X。
- 找出所有可以表示为 AX 形式的3×3矩阵。
- 确定操作 AX 的“零空间”和“列空间”的维度,并解释它们的维度之和为9的原因。
解释与解答
1. 找出所有满足 AX=0 的3×3矩阵 X
矩阵 A:
A=⎣⎢⎡1−10−11−1001⎦⎥⎤
零空间的定义:零空间 N(A) 是所有满足 AX=0 的矩阵 X 的集合。
求解 AX=0:
通过行简化或其他方法,可以发现 A 的行是线性相关的,其秩为2。因此,A 的零空间的维度为 3−2=1。零空间的一个基向量为:
⎣⎢⎡111⎦⎥⎤
因此,满足 AX=0 的矩阵 X 的列向量必须是这个基向量的倍数。所以,X 必须具有以下形式:
X=⎣⎢⎡aaabbbccc⎦⎥⎤
2. 找出所有可以表示为 AX 形式的3×3矩阵
列空间的定义:列空间 C(A) 是所有可以表示为 AX 形式的矩阵的集合。
求解 AX:
任何形式为 AX 的矩阵的列向量都是 A 的列向量的线性组合。因此,一个矩阵具有 AX 的形式,当且仅当它的每一列的和都为0。所以,可以表示为 AX 形式的矩阵 B 必须具有以下形式:
B=⎣⎢⎡adfb−a−d−b−ece−c−f⎦⎥⎤
3. 确定操作 AX 的“零空间”和“列空间”的维度,并解释它们的维度之和为9的原因
零空间的维度:零空间 N(A) 的维度为3,因为 A 的秩为2,而 A 是一个3×3矩阵。
列空间的维度:列空间 C(A) 的维度为6,因为 A 的秩为2,而 A 是一个3×3矩阵,所以 C(A) 的维度为 3×3−3=6。
维度之和:零空间的维度与列空间的维度之和为 3+6=9,这等于输入空间 M 的维度。这是因为 M 是所有3×3矩阵的空间,其维度为 3×3=9。
具体解答
a) 满足 AX=0 的矩阵 X:
X=⎣⎢⎡aaabbbccc⎦⎥⎤
b) 可以表示为 AX 形式的矩阵 B:
B=⎣⎢⎡adfb−a−d−b−ece−c−f⎦⎥⎤
c) 零空间和列空间的维度:
- 零空间的维度为3。
- 列空间的维度为6。
- 它们的维度之和为9,等于输入空间 M 的维度。